无人机如何乘风破浪
近期无人机跨海飞行引起了大众关注,跨海飞行对无人机的续航能力和远距离飞行能力有极高的要求,无人机的飞行能力很大程度上是受到能源供应系统的限制,因为无人机的推进系统和载荷系统对能量的大量消耗,而自身携带的能量又受到储能系统容量的限制,导致无人机难以获得理想的续航能力。
事实上,在自然界中,存在有许多体型较大的鸟类利用环境中的上升气流、风梯度、突风获取能量,提高自身的飞行能力,如鹰、秃鹫、信天翁等。其中鹰、秃鹫等鸟类主要是利用内陆环境中和海面波浪上方存在的上升气流进行滑翔飞行,利用上升气流抵消其相对空气的下沉速度,从而抵消阻力做的功,使其保持滞空状态;海鸥、信天翁等鸟类主要是利用风速的不均匀分布进行滑翔飞行。
信天翁在体型、速度上与一架小型的无人机很类似,对无人机的研究很有启发。那么信天翁是如何乘风破浪节省能量的呢?
由于气流与地表的摩擦,以及热交换等因素,在地表(水面或地面)上方附近,存在水平风速随高度增加变化的风场,类似的风场持久分布在逆温层中、地形障碍物的上方、高空急流范围内。在地表附近,因为摩擦效应风速随高度增加而增加。信天翁能够从风场中获取能量,在几乎不拍翅膀即不消耗自身能量的情况下进行长时间、长距离、甚至是环球飞行,在海面上变化的风场中飞行一天的距离可达1000km。
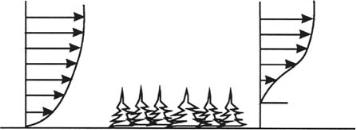
图1近地面风场剖面图
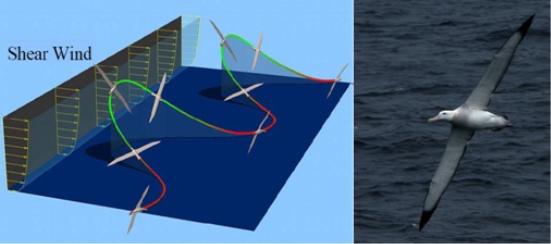
图2风梯度动态滑翔中的信天翁
通过在信天翁身上安装GPS信号跟踪器和在心脏附近安装脉搏计数器,探测信天翁的飞行轨迹,发现其飞行轨迹具有一定的周期性,且在梯度风场中长时间滑翔的心跳频率与其休息时的心跳频率基本相当,正好说明信天翁在滑翔过程中基本无需损耗自身能量。

图3在信天翁的背部安装了航迹追踪的GPS
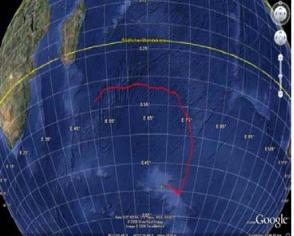
图4 GPS 追踪到的信天翁飞行轨迹
一个风梯度动态滑翔周期的飞行距离大约是150m,其基本动作分为4 部分:(1)逆风爬升-(2)高空转弯-(3)顺风下滑-(4)低空转弯。只要信天翁的姿态使得其受到的升力方向向风吹的方向倾斜,即“腹部迎风”的状态,风就可以对其做正功,使其能量增加。腹部迎风的状态既包括了高空转弯阶段,也包含了逆风爬升和顺风下滑阶段。从风梯度中获取的能量可以补偿阻力消耗能量的部分能量。
在信天翁一个滑翔周期内,其总能量变化如图6所示,用红圈分别标出了信天翁自身最小和最大能量位置。所以在一个动态滑翔周期内,爬升和下滑被认为是信天翁获取风能的主要环节。
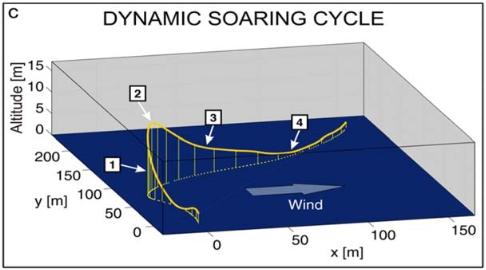
图5信天翁动态滑翔示意图:1 逆风爬升;2 高空转弯;3 顺风下滑;4 低空转弯
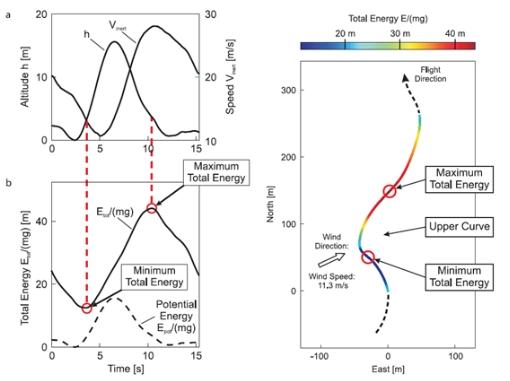
图6信天翁一个滑翔周期内的速度、高度及能量变化
如果能够将信天翁的滑翔技巧应用于无人机上,从空气中获取能量,将大幅提升无人机的续航性能,极大增加飞行时间和距离。而且所获取的能源来自于飞行环境,不需要额外的机载设备,也无需其他化学能的转化,更加绿色和高效。
风梯度动态滑翔无人机的翼型需满足:
高升阻比
适合于高空急转弯
随着风速的升高可以进行能量的获取
较小的寄生阻力以尽量减小能量的损失
科学家设计出了符合要求的风梯度动态滑翔的概念机,采用无线电遥控的方法在梯度风场中进行了风梯度动态滑翔实验,获得了极高的飞行速度。遥控滑翔机爱好者每年都进行滑翔比赛,控制无人机在山脊背风坡上方的风切变边界层来回上下穿梭,不断获得动能增益,以实现最大速度为终极目标,世界最快速度记录达到了惊人的229m/s(824km/h),相当于波音737客机的巡航速度。
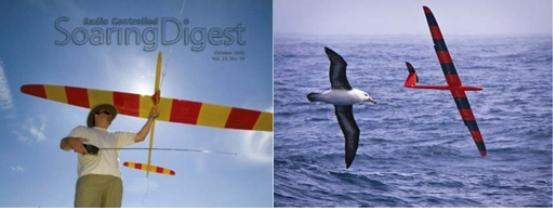
图7风梯度动态滑翔实验所用的遥控无人机
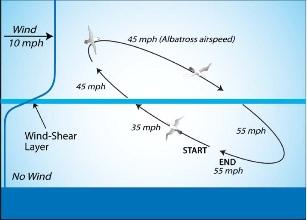
图8滑翔实验的飞行航迹示意图
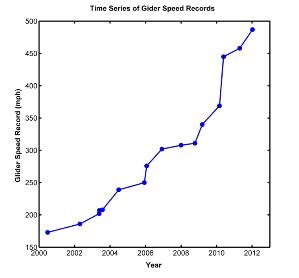
图9 2000-2012年间最高滑翔速度记录
原本风对无人机来说是一个干扰,而类似信天翁的无人滑翔机能从风场中获取能量,从对抗自然转变为利用自然,极大地拓展了续航性能。动态滑翔无人机可以在海面上进行长时间大范围地执行观测、勘察与监控等任务。在军事领域可为航行中的船舰提供预警,组成海上分布式监测系统监测潜艇动向。

