婀娜灵动的波动鳍仿生潜航器
鱼类经过数百万年的自然演化与优胜劣汰,获得了高效的游动能力和对水下各种复杂环境的适应能力,其在推进效率、机动性能和运动稳定性等方面具有人造潜航器难以比拟的优势。波动鳍仿生潜航器是人类以自然为师进行科学研究和原理样机研制的一个重要方向,也是一种以“运动优美、灵活敏捷、用途多样”为特点的仿生潜航器。
什么是波动鳍仿生潜航器?
波动鳍仿生潜航器是一种以黑魔鬼长刀鱼、黄貂鱼等鱼类作为仿生对象,通过一套仿生柔性长鳍推进装置产生推进力和操控力的潜航器。
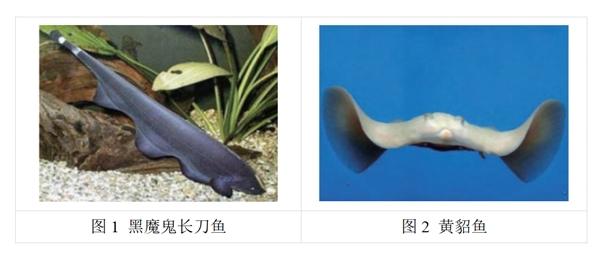
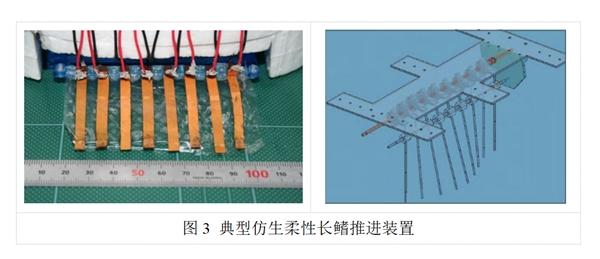
目前国内外院校、企业单位等研制的仿生柔性长鳍推进装置通常由1个长细型的柔性胸鳍、沿体长方向布置的多个驱动机构(多是伺服电机直驱摆杆往复摆动,或是伺服电机带动曲轴连杆机构运动)以及连接机构(多是固定在驱动机构上的刚性鳍条或夹爪,用于连接柔性胸鳍和驱动机构)组成,潜航器样机通过驱动机构带动连接机构进行往复摆动,带动胸鳍由前向后的每个区域以一定的角度差异和相近的角速度往复拍动,从而胸鳍面上形成类似黑魔鬼刀鱼长鳍的周期性规律运动形成高效推进涡场产生水下推进力与操控力。
目前国内外诸多高校和研究所对波动鳍仿生潜航器开展了大量的研究,各种各样的原理样机如雨后春笋般先后诞生。

图4 波动鳍仿生潜航器样机
波动鳍仿生潜航器有何优势?
首先波动鳍仿生潜航器给人的第一印象就是运动优美。仿生柔性长鳍推进装置在运动时依靠驱动机构和连接机构由前向后的差动往复摆动,带动柔性鳍面产生一个又一个的行波,在水中形成反卡门涡街从而产生推进力和操控力,这一过程看起来,柔性鳍面既像飘逸的舞者裙摆,又像灵动的舞龙表演,兼具美感和力量感。

图5 柔性鳍面运动示意图
另外更为重要的是波动鳍仿生潜航器具有灵活敏捷的机动能力。自然界中黑魔鬼长刀鱼、黄貂鱼在游动时可避免身体摆动造成游动阻力的增加,同时还具有很强的稳定性和机动能力,波动鳍仿生潜航器继承了这些优势,可以在执行上浮、下潜、前进、倒退等动作的同时维持姿态稳定,此外还可以依靠两侧仿生柔性长鳍推进装置向前后相反方向传递行波极大减小转弯半径,理论上可实现原地转向,这是其他类型潜航器难以比拟的优势。
最后波动鳍仿生潜航器还具有多样的用途。其水下运动姿态稳定、机动灵活的特点,使其适合用于水下环境探测、鱼群观测。目前在国内外最新的研究成果中,波动鳍仿生潜航器甚至可以实现陆地运动,可以预见,波动鳍仿生潜航器的研究不但可以提高现有水下潜航器的运动效率、机动能力,甚至会成为一种前景可期的新型水陆两栖潜航器。

图6 美国Velox机器人陆地运动
目前波动鳍仿生潜航器的研究工作主要集中在流体力学研究、仿生运动机构设计、游动控制等方面,相信随着后续关键技术的突破,这种新型潜航器会在未来参与到人类越来越多的工程活动中。

